מסוע טלסקופי ללוגיסטיקה
מפרטים/פרמטרים
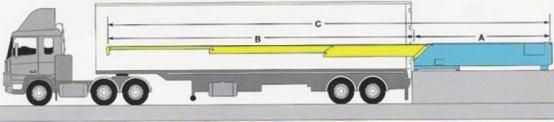
מסוע חגורה טלסקופי מורכב בעיקר מקטע קבוע, מקטע טלסקופי, מנגנון נהיגה טלסקופי, מנגנון שינוע חגורה, מנגנון נגד התנגשות ומערכת בקרה.
וכלול גם מנגנון עזר כלשהו המבוסס על דרישות הלקוח כגון מבנה חישוק, מערכת הרמה, מנגנון טיפוס וכן הלאה.
מכונות מסוג טלסקופי יכולות להיות בבנייה קונבנציונלית או דבשת (מכונות טלסקופיות עם דבשת משמשות בעיקר באתרים עם תנאים צפופים, שבהם נוח לסדר את הממשק בקצה הקדמי יותר של המכונה הטלסקופית בעת פריקת רכבים).
מבנה שונה של מסוע טלסקופי:
מסוע טלסקופי קבוע,
מסוע טלסקופי משופע /מסוע טלסקופי מטפס הרמה מסוע טלסקופי
סוג מסוע טלסקופי נייד/נייד, סוג צוואר אווז
פרמטרים
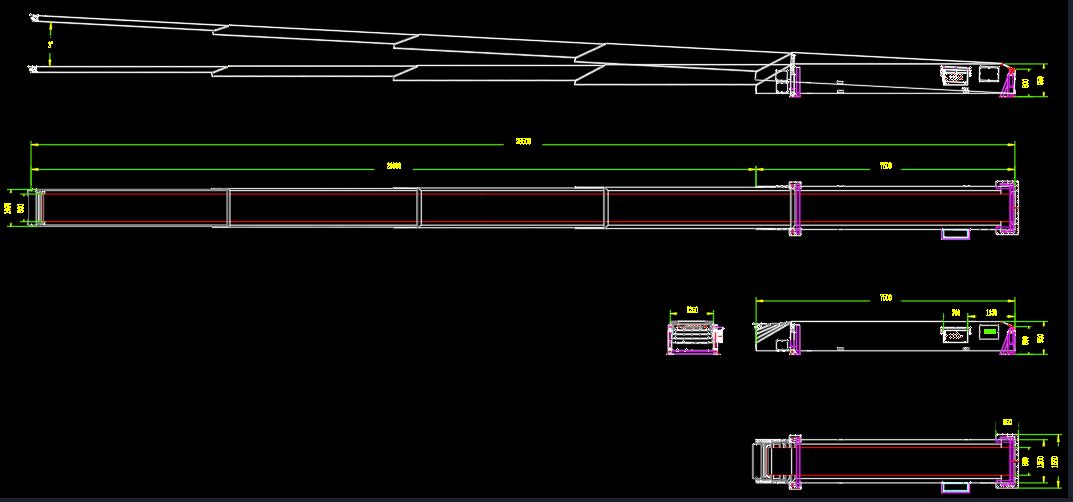
| לא. | מפרט | A (מ"מ) | B (מ"מ) | C (מ"מ) | E (מ"מ) | מבנה גבנון | רוחב החגורה (מ"מ) |
| סוף קבוע | קצה טלסקופי | אורך כולל | גובה קצה קבוע | ||||
| 1 | 3 | 5000 | 7000 | 12000 | 800 | —— | 800 |
| 2 | 6000 | 8400 | 14400 | 800 | אופציונאלי | ||
| 3 | 4 | 6000 | 12600 | 18600 | 900 | אופציונאלי | |
| 4 | 8000 | 17,000 | 25,000 | 900 | אופציונאלי | ||
| 5 | 5 | 6000 | 16000 | 22000 | 900 | אופציונאלי | |
| 6 | 7500 | 21000 | 28500 | 900 | אופציונאלי |
פרמטרים טכניים עיקריים


1. כושר נשיאת העומס של המסוע הוא לא פחות מ-60 ק"ג/㎡, עם פונקציית שינוע חיובית ושלילית.
2. כאשר החגורה פועלת, מרחק התנופה שמאלה וימינה של החגורה נמוך מ-20 מ"מ.
3. מהירות שינוע: 20-45 מ' לדקה (בקרת תדר, מהירות התחלתית היא 30 מ' לדקה);
מהירות מסוע טלסקופי במהירות גבוהה: 40-70 מ' לדקה (בקרת תדר, מהירות התחלתית היא 55 מ' לדקה).
4. מהירות מתיחה מקסימלית 10m/min, תדר מתכוונן.
5. רוחב חגורה 800 מ"מ, עובי 3 מ"מ; חומר PVK/PVC.
6. גוף המטוס צריך להיות בעל חוזק מספיק, מורחב במלואו במנוחה ועם עומס מלא, צניחת המכונה בעלת שלושת החלקים צריכה להיות פחות מ-50 מ"מ, הנפילה של ארבעת החלקים צריכה להיות פחות מ-120 מ"מ, והצניחה של חמישה חלקים צריכים להיות פחות מ-150 מ"מ.
7. מותג מנוע: SEW או Nord.
9. שרשרת ההרחבה מאמצת מותג באיכות גבוהה עם משטח שן גלגל שיניים מרווה.
תכונות תצורה
1. המנועים הטלסקופיים, מנועי ההנעה והתחנות ההידראוליות הם של מותגים מוכרים בארץ ובחו"ל.
2. זווית ההרמה וההורדה של המכונה הטלסקופית היא בדרך כלל בין -1° ל-3°, המותאמת בהתאם למצב הפרויקט.
3. כאשר המנוע הטלסקופי והשינוע מתחיל, יש לו את הפונקציה של התחלה איטית ופעולת הצבעה;זה יכול לממש את הפונקציה של העברת דואר תוך כדי טלסקופ, זה יכול לממש את הפונקציה של שינוע קדימה ואחורה, יש לשלוט במעבר קדימה ואחורה בנפרד ומעבר חלק.